
PID控制参数调节方法详解:掌握Kp、Ki、Kd,让系统运行更高效
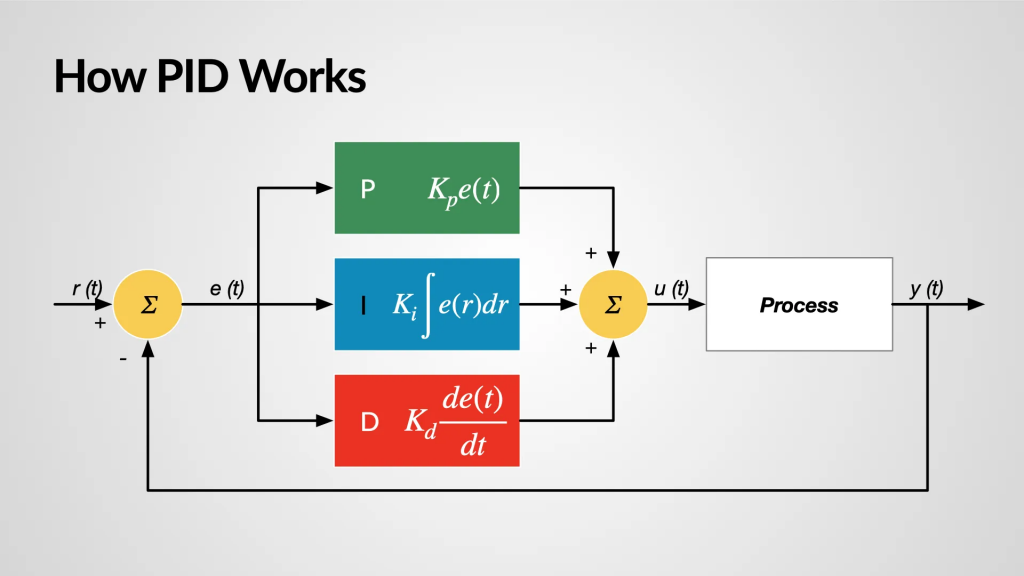
PID控制器(比例-积分-微分控制器)是工业自动化和过程控制系统中最常用的控制算法之一。无论是温度控制、压力控制、流量控制还是液位控制,PID算法几乎无处不在。PID控制器的核心在于通过调整三个关键参数:比例增益Kp、积分增益Ki和微分增益Kd,实现对系统输出的稳定控制。
但是,PID参数怎么调?怎么设定Kp、Ki、Kd?Ziegler-Nichols法怎么用? 这些问题困扰着大量工程师。本文将为你系统讲解PID参数调节方法,帮助你快速掌握这项核心技能。

一、PID控制器参数调节的挑战
虽然PID控制原理简单,但在复杂工业系统中,调节Kp、Ki、Kd并非易事。参数设置不合理,可能导致系统振荡、响应过慢,甚至完全失控。
常见调节难点包括:
- 系统动态特性复杂(如非线性、时滞大);
- 外部扰动和噪声影响大;
- 控制目标对响应速度、稳态误差、超调量有不同要求。
因此,找到一套稳定、快速、精准的PID参数,是实现高性能控制的关键。
二、PID参数调节的常用方法
1. 经验法调节(Ziegler-Nichols法 & Cohen-Coon法)
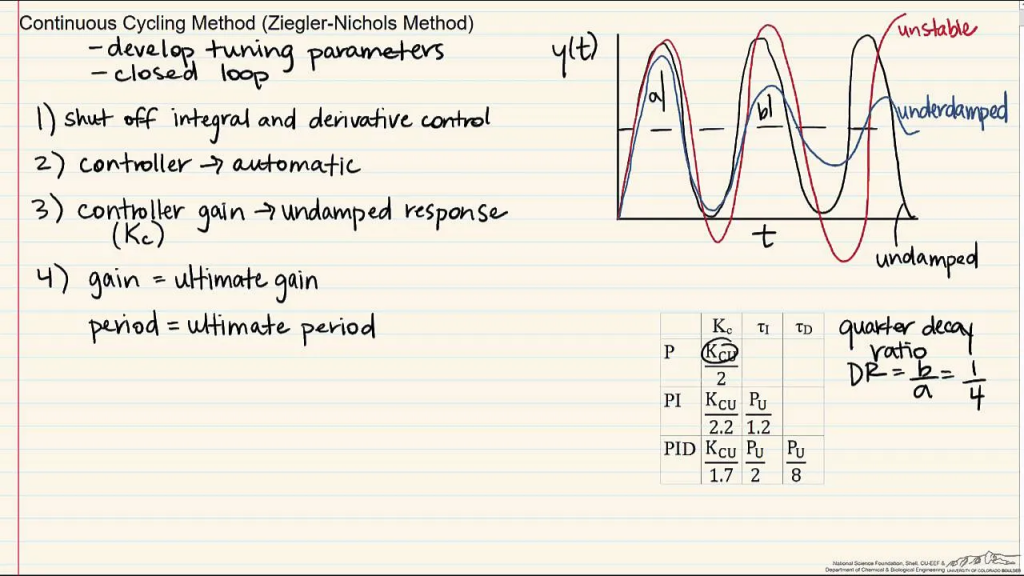
1.1 Ziegler-Nichols临界比例法
Ziegler-Nichols法是一种经典的PID参数整定方法,步骤如下:
- 将Ki和Kd设置为0,仅保留Kp;
- 缓慢增大Kp,直到系统输出出现持续振荡;
- 记录此时的Kp值(Ku)和振荡周期(Pu);
- 使用下表设定PID参数:
| 控制器类型 | Kp | Ki | Kd |
|---|---|---|---|
| P | 0.5Ku | – | – |
| PI | 0.45Ku | 1.2Kp/Pu | – |
| PID | 0.6Ku | 2Kp/Pu | Kp×Pu/8 |
🔍 适用场景:系统线性、无强扰动
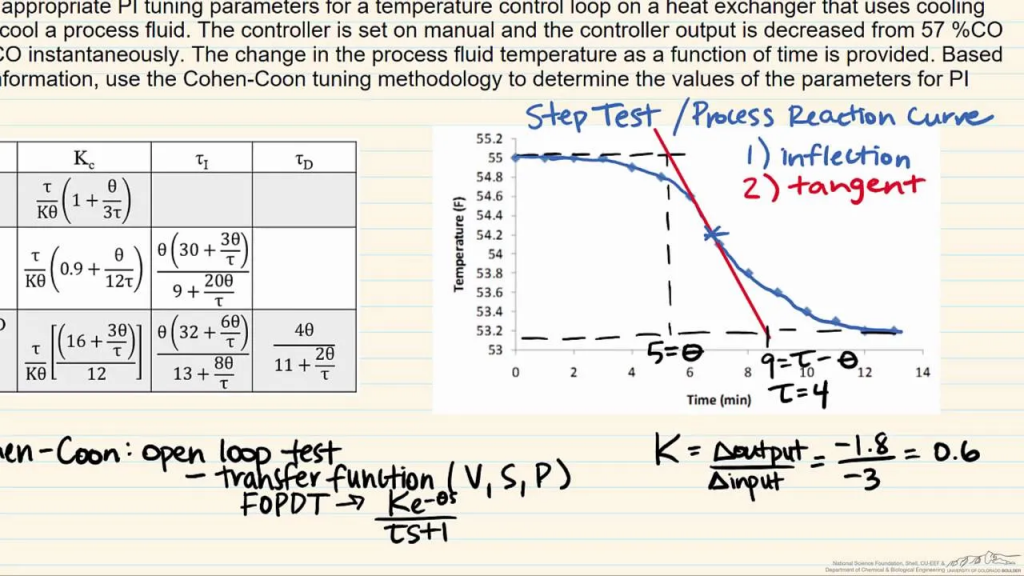
1.2 Cohen-Coon法
Cohen-Coon法适用于有明显时滞或响应较慢的系统。它通过记录系统阶跃响应参数(如延迟时间L和时间常数T)来计算PID参数,适用于过程控制中如锅炉、水处理等系统。
✅ 优点:考虑时滞,适用于滞后系统
❌ 缺点:需获取系统模型参数
2. 试凑法(人工调节法)
这种方法由经验丰富的工程师通过试验逐步调节PID参数:
- 先调Kp:响应太慢就增大,振荡则减小;
- 再调Ki:消除稳态误差,但Ki过大会导致振荡;
- 最后调Kd:用于抑制超调和震荡。
✅ 优点:无需系统模型,灵活适配
❌ 缺点:效率低,易受人为经验影响
3. 优化算法调节(智能算法)
随着工业控制系统智能化发展,越来越多企业采用优化算法进行PID整定。
常见优化算法:
- 遗传算法(GA):模拟自然选择,搜索全局最优PID参数;
- 粒子群算法(PSO):通过粒子位置变化搜索最优点;
- 模糊控制+PID融合:对不确定系统更具适应性。
🔍 特点:自动调节,适应非线性、复杂系统
⚠️ 注意:对计算资源有一定要求

三、PID参数调节要点汇总
调节PID控制器时,需要考虑以下关键因素:
1. 系统响应速度
- 快速系统:可适当增大Kp、Kd
- 慢速系统:适当提高Ki以消除误差
2. 噪声与扰动环境
- 噪声大:降低Kd,必要时对微分项加入低通滤波器
- 扰动频繁:适当提高Kp、降低Ki,避免系统震荡
3. 稳定性与鲁棒性
- 若系统振荡严重,应适当减小Kp或增加Kd
- 积分项过大会导致“积分饱和”,需谨慎调节Ki
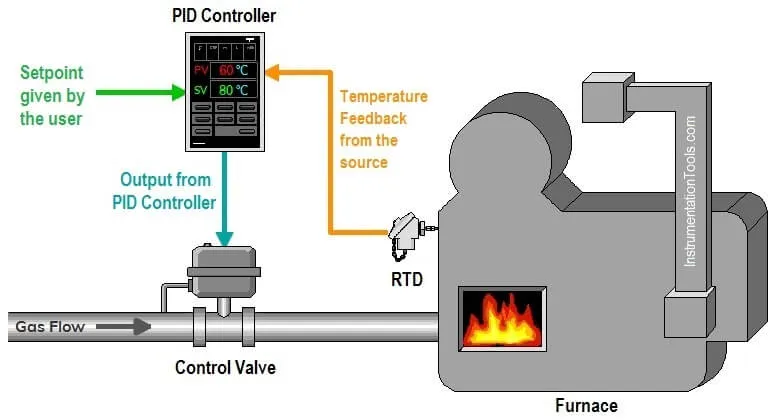
四、PID调节实战案例:工业加热炉温控
控制目标:
维持加热炉温度在设定值±1℃范围内
初始设置:
- Kp = 1.0,Ki = 0.1,Kd = 0.05
- 响应过快,过冲明显,最终稳定但有波动
优化过程:
- 减小Kp至0.7:降低响应速度,减少过冲;
- 增大Ki至0.15:改善稳态误差;
- 增加Kd至0.1:抑制波动,提升系统稳定性。
效果:
系统稳态误差小于0.5℃,响应时间减少30%,运行更平稳。
五、总结:选择合适的PID参数调节方法,让控制系统更高效
PID控制器能否高效运行,核心在于Kp、Ki、Kd参数设置是否合理。面对不同类型的系统,选择合适的调节方法至关重要:
- 简单系统:经验法或试凑法即可;
- 复杂系统:建议使用优化算法;
- 高噪声、高时滞系统:结合模糊控制或模型预测控制。
未来,PID控制将更多结合人工智能与机器学习算法,实现真正的自适应、自优化控制。
常见问题 FAQ
Q:PID参数如何快速整定?
A:可使用Ziegler-Nichols法获取初值,再通过试凑微调。
Q:为什么调完PID后系统仍振荡?
A:可能Kp过高、Ki过大或Kd设置不当,建议降低增益并引入滤波。
Q:优化算法是否能完全替代人工调节?
A:可大幅提高效率,但需系统模型或足够反馈数据支持。
参考文献
- Ziegler, J. G., & Nichols, N. B. (1942). Optimum settings for automatic controllers. Transactions of the ASME.
- Cohen, H., & Coon, G. A. (1953). Theoretical considerations of retarded control. IEEE Transactions on Automatic Control.
- Goldberg, D. E. (1989). Genetic Algorithms in Search, Optimization, and Machine Learning.
- Kennedy, J., & Eberhart, R. (1995). Particle Swarm Optimization.
- Zadeh, L. A. (1965). Fuzzy sets. Information and Control.
